
Imagine a world where robots don’t just work alongside humans but do so with the gentle touch of a caring hand, handling fragile objects or assisting in delicate surgeries without a hint of danger. This isn’t a far-off dream but a reality being shaped right now by researchers at MIT’s Computer Science and Artificial Intelligence Laboratory (CSAIL) and the Laboratory for Information and Decision Systems (LIDS). These innovators have unveiled a groundbreaking control system designed specifically for soft robots—those flexible, deformable machines built to interact closely with humans and sensitive environments. Unlike rigid robots that often feel clunky and risky in close quarters, soft robots promise a safer, more adaptable approach. Yet, their unpredictable movements have always posed a challenge. How do you ensure safety when a robot’s every twist and bend can create unexpected forces? The answer lies in this new framework from MIT, which balances safety with performance, opening doors to transformative applications across industries. From healthcare to home caregiving, the potential is staggering. Let’s dive into how this system is tackling the toughest hurdles in soft robotics and why it’s poised to redefine human-robot collaboration.
Addressing the Safety Puzzle in Soft Robotics
Safety has always been the linchpin for robots operating near humans, but with soft robots, the stakes are uniquely high. Crafted from compliant materials, these robots are inherently less hazardous than their rigid counterparts, bending and yielding instead of clashing with force. However, this very flexibility introduces a complex problem: unpredictable dynamics. A slight shift in position can generate unexpected forces, risking harm to nearby people or damage to delicate objects. The MIT team has risen to this challenge with a control system that meticulously defines safe force limits, ensuring the robot never oversteps. This is especially vital in high-stakes environments like surgical suites, where a robot might assist with intricate procedures, or in caregiving roles, where gentle interaction with vulnerable individuals is non-negotiable. By embedding safety as a core principle, this system doesn’t just react to risks—it anticipates them, creating a protective barrier around every interaction.
Moreover, this focus on safety is about more than just preventing accidents; it’s about fostering trust. For soft robots to truly integrate into everyday human spaces, they must be seen as reliable partners, not unpredictable liabilities. The MIT framework achieves this by teaching these machines to recognize their own limits, adjusting in real time to avoid excessive contact or pressure. Think of a robotic arm gently pressing against a soft surface, sensing the boundary of safe force and holding back before any harm can occur. This isn’t just a technical fix; it’s a step toward a future where robots are as dependable as a skilled human hand. The implications ripple out to industries where precision and safety must coexist, setting a new standard for what soft robots can achieve.
Crafting a Cutting-Edge Control Framework
At the heart of this safety revolution is a sophisticated blend of advanced control theories, meticulously engineered to tame the wild dynamics of soft robots. The MIT researchers have harnessed nonlinear control methods, pairing them with high-order control barrier functions (HOCBFs) and high-order control Lyapunov functions (HOCLFs). These aren’t just fancy terms—they’re the building blocks of a system where HOCBFs act as digital guardrails, setting strict boundaries to prevent excessive force, while HOCLFs steer the robot toward its goals without ever breaching safety limits. This dual mechanism marks a significant leap over older control approaches, which often faltered when faced with the fluid, ever-changing nature of soft materials. The result is a robot that doesn’t just move—it moves with purpose and caution, balancing task completion with an unwavering commitment to safety.
Complementing this theoretical foundation are predictive tools that give soft robots an almost intuitive grasp of their environment. The Piecewise Cosserat-Segment (PCS) dynamics model forecasts how a robot’s flexible body will deform under different forces, allowing for precise adjustments before issues arise. Alongside it, the Differentiable Conservative Separating Axis Theorem (DCSAT) calculates safe distances from obstacles, ensuring the robot maintains a protective buffer during interactions. These innovations work in harmony, enabling the robot to navigate complex scenarios with a proactive sense of its surroundings. Whether it’s gliding along a curved surface or working near a human, the system anticipates challenges and adapts seamlessly. This isn’t merely about control; it’s about crafting a robot that thinks ahead, blending mathematical rigor with real-world responsiveness.
Unleashing Real-World Potential
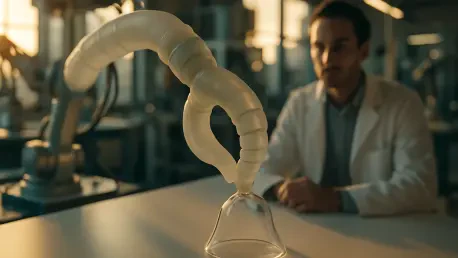
The true test of any innovation lies in its practical impact, and the MIT system shines brightly in this regard through a series of compelling experiments. Picture a soft robotic arm pressing against a pliable surface, maintaining exact force levels to avoid overexertion—never once crossing into unsafe territory. In another striking demo, the robot traced the intricate contours of a curved object, adjusting its grip on the fly to prevent slippage or damage. Perhaps most impressive was its ability to collaborate directly with a human, handling fragile items and responding instantly to unexpected nudges or shifts. These scenarios aren’t just lab exercises; they’re proof of a system that can generalize across diverse tasks while adhering to strict safety boundaries. The adaptability on display hints at a future where robots aren’t confined to rigid roles but excel in dynamic, human-centric settings.
Beyond the lab, the implications of this versatility are profound. In healthcare, such robots could become invaluable allies in delicate surgeries, offering precision without the risk of unintended harm. In industrial settings, they might handle fragile goods on assembly lines, reducing errors and oversight costs. Even in homes, they could assist with caregiving tasks, interacting safely with children or the elderly. This isn’t a niche innovation—it’s a game-changer for any field where safety and adaptability must go hand in hand. As these experiments demonstrate, the MIT framework doesn’t just solve technical problems; it unlocks a spectrum of possibilities, positioning soft robots as transformative tools across countless environments. The vision of robots as trusted partners feels closer than ever, thanks to this remarkable stride in control technology.
Closing the Intelligence Divide
For all their physical advantages, soft robots have historically lagged behind rigid robots when it comes to decision-making and safety intelligence. Their natural compliance offers a built-in safety edge, but without a robust system to guide their choices, that edge dulls quickly. The MIT team’s work tackles this gap head-on by adapting proven algorithms from rigid robotics and customizing them for the unique, fluid dynamics of soft systems. This isn’t just a tweak—it’s a fundamental提升, enabling these robots to not only flex and bend but also think critically about safety. The result is a machine that combines the best of both worlds: the gentle touch of soft materials with the calculated reliability of advanced control. This elevation in cognitive capability marks a turning point, making soft robots as dependable as they are versatile.
This push toward smarter, safer soft robots also mirrors a larger trend in the robotics field—building machines that can blend seamlessly into human spaces. Safety isn’t just a feature here; it’s the foundation for broader acceptance and integration. Consider a future where a robot assists in a hospital, moving with the precision of a surgeon and the gentleness of a nurse, all while ensuring no harm comes to patients. That future hinges on systems like the one MIT has developed, which prioritizes informed decision-making alongside physical adaptability. By bridging this intelligence divide, the research paves the way for robots to become everyday allies, trusted not just for their softness but for their sharp awareness of the world around them. It’s a compelling step toward redefining what robotic collaboration can be.
Paving the Path Forward for Soft Robotics
Looking back, the journey of this MIT research stands as a defining moment in the evolution of soft robotics. The team tackled the intricate puzzle of controlling flexible, unpredictable machines and delivered a system that harmonized safety with performance. Through rigorous experiments, they demonstrated how a soft robotic arm could handle delicate tasks with precision, adapt to complex scenarios, and work alongside humans without a misstep. Their fusion of advanced control theories and predictive modeling set a benchmark, proving that safety needn’t come at the expense of capability. This achievement reshaped the conversation around how robots could serve in sensitive, high-impact areas like healthcare and caregiving.
Moving ahead, the next steps are clear and exciting. The focus should shift to expanding this framework to three-dimensional soft robots, tackling even more intricate environments. Integrating learning-based strategies could further enhance adaptability, preparing these robots for unpredictable real-world challenges. Stakeholders in robotics and related fields should prioritize collaboration, pooling expertise to refine and scale these innovations. For industries eyeing the potential of soft robots, investing in user-friendly adaptations of this technology could accelerate adoption. Ultimately, the groundwork laid by this research invites a bold vision: a world where robots are not just tools but trusted companions, seamlessly woven into the fabric of daily life, enhancing safety and quality across every interaction.