
Engineers from the Massachusetts Institute of Technology and Stanford University have successfully developed a groundbreaking robotic gripper that draws its inspiration from the tenacious and powerful gripping ability of horticultural vines, offering a novel solution to the long-standing challenge of manipulating objects that are simultaneously heavy and delicate. This innovative device utilizes soft, inflatable tendrils that can adapt their shape to securely lift a wide array of items, a stark departure from conventional rigid grippers that often risk damaging fragile goods. By mimicking nature’s design, this technology introduces a more versatile and gentler approach to complex manipulation tasks, heralding significant advancements across fields from eldercare and logistics to industrial automation. The core of this innovation lies in a unique mechanism where the growing tendrils transform their structure to form a secure, sling-like grasp, capable of handling everything from the human body to a fragile glass vase with equal care.
The Science Behind the Grip
Nature’s Blueprint
The conceptual foundation for this sophisticated robotic system is deeply rooted in the biomechanics of the natural world, specifically the behavior of grabby, woody vines. In horticulture, certain climbing plants exhibit a remarkable capacity to grow and entwine their tendrils around surrounding structures, such as fences or trees. These tendrils can exert an astonishing amount of force, coiling around obstacles with a tenacity strong enough to eventually compromise entire structures. This elegant blend of gentle, incremental growth and powerful, distributed force provided the ideal blueprint for the engineering team. By observing how these plants create a secure hold without crushing their support, the researchers identified a model for a gripper that could apply firm pressure evenly across a surface. This natural strategy avoids the concentrated stress points that are a common drawback of traditional pincer-like robotic hands, which can easily damage delicate or irregularly shaped objects.
The resulting robotic system skillfully translates this natural mechanism into a functional and controllable technology. The device is centered around a pressurized box that acts as the operational base, from which long, vine-like tubes are deployed. The “growth” of these tubes is achieved through a process known as eversion, where they inflate with precisely controlled air pressure and extend from their tips, much like a sock being turned inside out. This ingenious method allows the tendrils to grow and navigate through their environment without their outer surface sliding against obstacles. This minimizes friction and enables them to maneuver through cluttered or tight spaces with remarkable ease. As these soft robotic vines extend toward a target object, they are engineered to twist and coil around it, perfectly mimicking the natural action of their botanical counterparts to establish a firm, stable, and distributed hold that cradles the object rather than pinching it.
A Transformative Mechanism
A critical and defining feature of this new gripper is its unique ability to transform from an “open-loop” to a “closed-loop” system, a topological shift that is the key to its powerful lifting capability. Previous research into soft, vine-inspired robots had primarily focused on “open-loop” systems. In this configuration, the robotic tendril behaves like an open-ended string, capable of extending, bending, and navigating complex environments but lacking the ability to anchor itself back to a fixed point to form a complete, load-bearing circuit. While these earlier designs were excellent for exploration and light manipulation, they could not generate the force needed to lift heavy objects. The joint team recognized that to achieve a true lifting action, this loop needed to be closed, transforming the flexible tendril into a structured and secure sling.
The new design successfully integrates both configurations into a seamless two-stage process. In its initial, open-loop stage, the robotic vine can freely grow, explore its environment, and delicately wrap around the target object. It can even burrow underneath a person lying on a bed without causing discomfort. Once this initial grasp is established, the vine continues its growth trajectory back toward the pressurized box from which it originated. Upon reaching the box, it is fed through an automated clamping mechanism that firmly secures the end of the vine, thereby transforming the system into a robust closed loop. This closed loop can then be mechanically retracted using an integrated winch, which winds the vine back up and gently lifts the captured object in a secure and supportive suspension. This novel process leverages the best of both forms: the dexterity and gentleness of the open loop for initial positioning and the structural integrity and strength of the closed loop for powerful and secure lifting.
Real-World Applications and Potential
A Gentle Solution for Eldercare
The initial motivation for this sophisticated research stemmed from a significant and physically demanding challenge in eldercare and rehabilitation settings: the task of safely transferring a person from a bed. This process is consistently ranked as one of the most strenuous and risky tasks for caregivers, often leading to injury for both the caregiver and the patient. The conventional method typically involves a mechanical patient lift, which requires the caregiver to first physically roll the patient onto their side to place a hammock-like sheet underneath them, then roll them back. This sheet is then strapped and hooked to the lift, which hoists the patient. The procedure can be uncomfortable, undignified for the patient, and physically taxing for the caregiver, creating a need for a more automated and gentler alternative.
To demonstrate a viable solution, the team constructed a large-scale prototype designed specifically for this application. The system features a set of pressurized boxes mounted on an overhead bar positioned above a standard bed. When activated, the inflatable vines slowly and gently unfurl from these boxes, extending downward and meticulously working their way under and around a person lying in the bed. The low-pressure, soft nature of the tendrils ensures patient comfort and safety throughout this delicate phase. Once the vines have fully encircled the person at strategic points, such as under the head and feet, they grow back up to their respective boxes. There, they are clamped to create closed loops and are then slowly winched upwards. This coordinated action lifts the person in a soft, evenly distributed sling, effectively relieving the caregiver of the immense physical burden and making the transfer experience significantly more comfortable and secure for the patient.
Beyond Healthcare a Versatile Tool
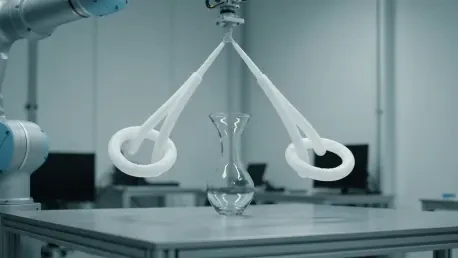
While the needs of eldercare provided the primary impetus for the project, the researchers quickly recognized that the design’s inherent adaptability made it suitable for a vast range of other grasping and manipulation tasks. To explore this potential, they developed a smaller, more compact version of the gripper that can be mounted onto a standard commercial robotic arm, showcasing its versatility and ease of integration into existing automated systems. In a series of compelling demonstrations, this smaller system successfully grasped and lifted an impressive variety of heavy and fragile objects, proving its unique capabilities in handling items that would pose a significant challenge to conventional robotic grippers. This flexibility underscores the platform’s potential to revolutionize industries far beyond healthcare.
The list of objects successfully manipulated by the robot included a large watermelon, a delicate glass vase, a heavy kettlebell, a stack of loose metal rods, and a large playground ball. These tests highlighted the robot’s remarkable ability to conform to different shapes, sizes, textures, and weights while applying a gentle yet exceptionally secure force. Furthermore, the system demonstrated a pronounced aptitude for navigating complex and unstructured environments. In one test, the vine-like tendrils were able to snake through a cluttered bin of assorted objects to isolate and retrieve a specific target item, a task that is notoriously difficult for rigid robotic grippers that lack the necessary dexterity. This ability opens up numerous possibilities for future applications in fields such as agriculture, where it could be used to gently harvest delicate fruits and vegetables without bruising, or in logistics and heavy industry for loading and unloading sensitive or irregularly shaped cargo.
The Future of Soft Robotic Manipulation
The research, published in the journal Science Advances, outlined a novel design that successfully pushed the boundaries of soft robotics. The core innovation—the strategic transformation from a flexible open-loop to a strong closed-loop configuration—enabled a unique combination of gentle maneuverability and powerful lifting force. The collaborative team created a system that promises to solve immediate challenges in eldercare and introduces a versatile platform for a multitude of other applications. The project highlighted the distinct advantages of soft robots, which are relatively safe, low-cost, and highly customizable for specific human needs, presenting a compelling alternative to more complex and rigid humanoid robots. The development not only offered a practical solution for assisting people with mobility challenges but also heralded a future where robots could interact with the world, and with people, with greater gentleness, security, and adaptability than ever before.







